Zermelo's navigation problem
In mathematical optimization, Zermelo's navigation problem, proposed in 1931 by Ernst Zermelo, is a classic optimal control problem that deals with a boat navigating on a body of water, originating from a point to a destination point . The boat is capable of a certain maximum speed, and the goal is to derive the best possible control to reach in the least possible time.


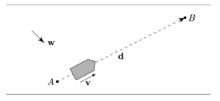


Without considering external forces such as current and wind, the optimal control is for the boat to always head towards . Its path then is a line segment from to , which is trivially optimal. With consideration of current and wind, if the combined force applied to the boat is non-zero the control for no current and wind does not yield the optimal path.
History
In his 1931 article,[1] Ernst Zermelo formulates the following problem:
In an unbounded plane where the wind distribution is given by a vector field as a function of position and time, a ship moves with constant velocity relative to the surrounding air mass. How must the ship be steered in order to come from a starting point to a given goal in the shortest time?

This is an extension of the classical optimisation problem for geodesics – minimising the length of a curve connecting points and , with the added complexity of considering some wind velocity. Although it is usually impossible to find an exact solution in most cases, the general case was solved by Zermelo himself in the form of a partial differential equation, known as Zermelo's equation, which can be numerically solved.
![{\displaystyle I[c]=\int _{a}^{b}{\sqrt {1+y'^{2}}}\,dx}](../I/m/1b04156580685fa55ae0bd89f9aa40b5f9b3ecca.svg)
Constant-wind case
The case of constant wind is easy to solve exactly.[2] Let , and suppose that to minimise the travel time the ship travels at a constant maximum speed . Thus the position of the ship at time is . Let be the time of arrival at , so that . Taking the dot product of this with and respectively results in and . Eliminating and writing this system as a quadratic in results in . Upon solving this, taking the positive square-root since is positive, we obtain











![{\displaystyle {\begin{aligned}T[\mathbf {d} ]&={\frac {-2(\mathbf {d} \cdot \mathbf {w} )\pm {\sqrt {4(\mathbf {d} \cdot \mathbf {w} )^{2}+4\mathbf {d} ^{2}(\mathbf {v} ^{2}-\mathbf {w} ^{2})}}}{2(\mathbf {v} ^{2}-\mathbf {w} ^{2})}}\\[8pt]&={\sqrt {{\frac {\mathbf {d} ^{2}}{\mathbf {v} ^{2}-{\vec {w}}^{2}}}+{\frac {(\mathbf {d} \cdot \mathbf {w} )^{2}}{({\vec {v}}^{2}-{\vec {w}}^{2})^{2}}}}}-{\frac {\mathbf {d} \cdot \mathbf {w} }{\mathbf {v} ^{2}-\mathbf {w} ^{2}}}\end{aligned}}}](../I/m/11b484d95059b967bd52066dde8f42f6160db03f.svg)
Claim: This defines a metric on , provided .


Proof
By our assumption, clearly with equality if and only if . Trivially if , we have . It remains to show satisfies a triangle inequality
![{\displaystyle T[\mathbf {d} ]\geq 0}](../I/m/0253a1f92eb75bcbba27675241113de873068d53.svg)


![{\displaystyle T[\mathbf {d} ]=T[{\tilde {\mathbf {d} }}]}](../I/m/bd099406a013c9f8fd3559d068cc019425c9eeef.svg)
![{\displaystyle T[\mathbf {d} _{1}+\mathbf {d} _{2}]\leq T[\mathbf {d} _{1}]+T[\mathbf {d} _{2}].}](../I/m/116c51412a6ec6b624b8b9ff728e037d38e9f84d.svg)
Indeed, letting , we note that this is true if and only if

![{\displaystyle {\begin{aligned}&{\sqrt {{\frac {(\mathbf {d} _{1}+\mathbf {d} _{2})^{2}}{c^{2}}}+{\frac {(({\vec {d}}_{1}+{\vec {d}}_{2})\cdot {\vec {w}})^{2}}{c^{4}}}}}-{\frac {(\mathbf {d} _{1}+\mathbf {d} _{2})\cdot \mathbf {w} }{c^{2}}}\\[8pt]\leq {}&{\sqrt {{\frac {\mathbf {d} _{1}^{2}}{c^{2}}}+{\frac {(\mathbf {d} _{1}\cdot \mathbf {w} )^{2}}{c^{4}}}-{\frac {\mathbf {d} _{2}\cdot \mathbf {w} }{c^{2}}}}}+{\sqrt {{\frac {\mathbf {d} _{2}^{2}}{c^{2}}}+{\frac {(\mathbf {d} _{2}\cdot \mathbf {w} )^{2}}{c^{4}}}}}-{\frac {\mathbf {d} _{2}\cdot \mathbf {w} }{c^{2}}}\end{aligned}}}](../I/m/d69695249c3decdfff95770694a975ea10adc0f2.svg)
if and only if
![{\displaystyle {\frac {\mathbf {d} _{1}\cdot \mathbf {d} _{2}}{c^{2}}}+{\frac {(\mathbf {d} _{1}\cdot \mathbf {w} )(\mathbf {d} _{2}\cdot \mathbf {w} )}{c^{4}}}\leq \left[{\frac {{\vec {d}}_{1}^{2}}{c^{2}}}+{\frac {(\mathbf {d} _{1}\cdot \mathbf {w} )^{2}}{c^{4}}}\right]^{1/2}\left[{\frac {{\vec {d}}_{2}^{2}}{c^{2}}}+{\frac {(\mathbf {d} _{2}\cdot \mathbf {w} )^{2}}{c^{4}}}\right]^{1/2},}](../I/m/0de02e0a7ff01055f06e0cf0c8e62230c8c61148.svg)
which is true if and only if

Using the Cauchy–Schwartz inequality, we obtain with equality if and only if and are linearly dependent, and so the inequality is indeed true.




Note: Since this is a strict inequality if and are not linearly dependent, it immediately follows that a straight line from to is always a faster path than any other path made up of straight line segments. We use a limiting argument to prove this is true for any curve.
General solution
Consider the general example of a ship moving against a variable wind . Writing this component-wise, we have the drift in the -axis as and the drift in the -axis as . Then for a ship moving at maximum velocity at variable heading , we have







The Hamiltonian of the system is thus

Using the Euler–Lagrange equation, we obtain

The last equation implies that . We note that the system is autonomous; the Hamiltonian does not depend on time , thus = constant, but since we are minimising time, the constant is equal to 0. Thus we can solve the simultaneous equations above to get[3]


![{\displaystyle {\begin{aligned}\lambda _{x}&={\frac {-\cos \theta }{V+u\cos \theta +v\sin \theta }}\\[6pt]\lambda _{y}&={\frac {-\sin \theta }{V+u\cos \theta +v\sin \theta }}\end{aligned}}}](../I/m/36a53c6ae1e31b2d5c2660d184393971dc83e827.svg)
Substituting these values into our EL-equations results in the differential equation

This result is known as Zermelo's equation. Solving this with our system allows us to find the general optimum path.
Constant-wind revisited example
If we go back to the constant wind problem for all time, we have

so our general solution implies , thus is constant, i.e. the optimum path is a straight line, as we had obtained before with an algebraic argument.

References
- ↑ Zermelo, Ernst (1931). "Über das Navigationsproblem bei ruhender oder veränderlicher Windverteilung". ZAMM – Journal of Applied Mathematics and Mechanics / Zeitschrift für Angewandte Mathematik und Mechanik. 11 (2).
- ↑ Warnick, Claude (2011). "The geometry of sound rays in a wind". Contemporary Physics. 52: 197–209.
- ↑ Bryson, A.E. (1975). Applied Optimal Control: Optimization, Estimation and Control. Taylor & Francis.