Convexity in economics
| Economics |
|---|
_Per_Capita_in_2015.svg.png) |
|
|
| By application |
|
| Lists |
|
Convexity is an important topic in economics.[1] In the Arrow–Debreu model of general economic equilibrium, agents have convex budget sets and convex preferences: At equilibrium prices, the budget hyperplane supports the best attainable indifference curve.[2] The profit function is the convex conjugate of the cost function.[1][2] Convex analysis is the standard tool for analyzing textbook economics.[1] Non‑convex phenomena in economics have been studied with nonsmooth analysis, which generalizes convex analysis.[3]
Preliminaries
The economics depends upon the following definitions and results from convex geometry.
Real vector spaces


A real vector space of two dimensions may be given a Cartesian coordinate system in which every point is identified by a list of two real numbers, called "coordinates", which are conventionally denoted by x and y. Two points in the Cartesian plane can be added coordinate-wise
- (x1, y1) + (x2, y2) = (x1+x2, y1+y2);
further, a point can be multiplied by each real number λ coordinate-wise
- λ (x, y) = (λx, λy).
More generally, any real vector space of (finite) dimension D can be viewed as the set of all possible lists of D real numbers { (v1, v2, . . . , vD) } together with two operations: vector addition and multiplication by a real number. For finite-dimensional vector spaces, the operations of vector addition and real-number multiplication can each be defined coordinate-wise, following the example of the Cartesian plane.
Convex sets
In a real vector space, a set is defined to be convex if, for each pair of its points, every point on the line segment that joins them is covered by the set. For example, a solid cube is convex; however, anything that is hollow or dented, for example, a crescent shape, is non‑convex. Trivially, the empty set is convex.
More formally, a set Q is convex if, for all points v0 and v1 in Q and for every real number λ in the unit interval [0,1], the point
- (1 − λ) v0 + λv1
is a member of Q.
By mathematical induction, a set Q is convex if and only if every convex combination of members of Q also belongs to Q. By definition, a convex combination of an indexed subset {v0, v1, . . . , vD} of a vector space is any weighted average λ0v0 + λ1v1 + . . . + λDvD, for some indexed set of non‑negative real numbers {λd} satisfying the equation λ0 + λ1 + . . . + λD = 1.
The definition of a convex set implies that the intersection of two convex sets is a convex set. More generally, the intersection of a family of convex sets is a convex set.
Convex hull
For every subset Q of a real vector space, its convex hull Conv(Q) is the minimal convex set that contains Q. Thus Conv(Q) is the intersection of all the convex sets that cover Q. The convex hull of a set can be equivalently defined to be the set of all convex combinations of points in Q.
Duality: Intersecting half-spaces


Supporting hyperplane is a concept in geometry. A hyperplane divides a space into two half-spaces. A hyperplane is said to support a set in the real n-space if it meets both of the following:

- is entirely contained in one of the two closed half-spaces determined by the hyperplane
- has at least one point on the hyperplane.
Here, a closed half-space is the half-space that includes the hyperplane.
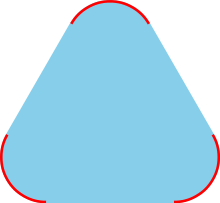
Supporting hyperplane theorem
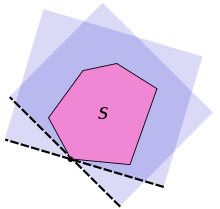
This theorem states that if is a closed convex set in and is a point on the boundary of then there exists a supporting hyperplane containing




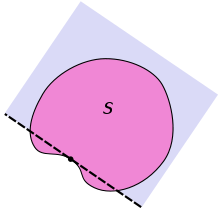
The hyperplane in the theorem may not be unique, as noticed in the second picture on the right. If the closed set is not convex, the statement of the theorem is not true at all points on the boundary of as illustrated in the third picture on the right.
Economics

An optimal basket of goods occurs where the consumer's convex preference set is supported by the budget constraint, as shown in the diagram. If the preference set is convex, then the consumer's set of optimal decisions is a convex set, for example, a unique optimal basket (or even a line segment of optimal baskets).
For simplicity, we shall assume that the preferences of a consumer can be described by a utility function that is a continuous function, which implies that the preference sets are closed. (The meanings of "closed set" is explained below, in the subsection on optimization applications.)
Non‑convexity

If a preference set is non‑convex, then some prices produce a budget supporting two different optimal consumption decisions. For example, we can imagine that, for zoos, a lion costs as much as an eagle, and further that a zoo's budget suffices for one eagle or one lion. We can suppose also that a zoo-keeper views either animal as equally valuable. In this case, the zoo would purchase either one lion or one eagle. Of course, a contemporary zoo-keeper does not want to purchase a half an eagle and a half a lion (or a griffin)! Thus, the contemporary zoo-keeper's preferences are non‑convex: The zoo-keeper prefers having either animal to having any strictly convex combination of both.
Non‑convex sets have been incorporated in the theories of general economic equilibria,[4] of market failures,[5] and of public economics.[6] These results are described in graduate-level textbooks in microeconomics,[7] general equilibrium theory,[8] game theory,[9] mathematical economics,[10] and applied mathematics (for economists).[11] The Shapley–Folkman lemma results establish that non‑convexities are compatible with approximate equilibria in markets with many consumers; these results also apply to production economies with many small firms.[12]
In "oligopolies" (markets dominated by a few producers), especially in "monopolies" (markets dominated by one producer), non‑convexities remain important.[13] Concerns with large producers exploiting market power in fact initiated the literature on non‑convex sets, when Piero Sraffa wrote about on firms with increasing returns to scale in 1926,[14] after which Harold Hotelling wrote about marginal cost pricing in 1938.[15] Both Sraffa and Hotelling illuminated the market power of producers without competitors, clearly stimulating a literature on the supply-side of the economy.[16] Non‑convex sets arise also with environmental goods (and other externalities),[17][18] with information economics,[19] and with stock markets[13] (and other incomplete markets).[20][21] Such applications continued to motivate economists to study non‑convex sets.[22]
Nonsmooth analysis
Economists have increasingly studied non‑convex sets with nonsmooth analysis, which generalizes convex analysis. "Non‑convexities in [both] production and consumption ... required mathematical tools that went beyond convexity, and further development had to await the invention of non‑smooth calculus" (for example, Francis Clarke's locally Lipschitz calculus), as described by Rockafellar & Wets (1998)[23] and Mordukhovich (2006),[24] according to Khan (2008).[3] Brown (1995, pp. 1967–1968) wrote that the "major methodological innovation in the general equilibrium analysis of firms with pricing rules" was "the introduction of the methods of non‑smooth analysis, as a [synthesis] of global analysis (differential topology) and [of] convex analysis." According to Brown (1995, p. 1966), "Non‑smooth analysis extends the local approximation of manifolds by tangent planes [and extends] the analogous approximation of convex sets by tangent cones to sets" that can be non‑smooth or non‑convex..[25] Economists have also used algebraic topology.[26]
Notes
- 1 2 3 Newman (1987c)
- 1 2 Newman (1987d)
- 1 2 Khan, M. Ali (2008). "Perfect competition". In Durlauf, Steven N.; Blume, Lawrence E., ed. The New Palgrave Dictionary of Economics (Second ed.). Palgrave Macmillan. doi:10.1057/9780230226203.1267.
- ↑ Pages 392–399 and page 188: Arrow, Kenneth J.; Hahn, Frank H. (1971). "Appendix B: Convex and related sets". General competitive analysis. Mathematical economics texts [Advanced textbooks in economics]. San Francisco: Holden-Day, Inc. [North-Holland]. pp. 375–401. ISBN 0-444-85497-5. MR 439057.
Pages 52–55 with applications on pages 145–146, 152–153, and 274–275: Mas-Colell, Andreu (1985). "1.L Averages of sets". The Theory of General Economic Equilibrium: A Differentiable Approach. Econometric Society Monographs. Cambridge University Press. ISBN 0-521-26514-2. MR 1113262.
Theorem C(6) on page 37 and applications on pages 115–116, 122, and 168: Hildenbrand, Werner (1974). Core and equilibria of a large economy. Princeton studies in mathematical economics. Princeton University Press. pp. viii+251. ISBN 978-0-691-04189-6. MR 389160.
- ↑ Pages 112–113 in Section 7.2 "Convexification by numbers" (and more generally pp. 107–115): Salanié, Bernard (2000). "7 Nonconvexities". Microeconomics of market failures (English translation of the (1998) French Microéconomie: Les défaillances du marché (Economica, Paris) ed.). MIT Press. pp. 107–125. ISBN 0-262-19443-0. ISBN 978-0-262-19443-3.
- ↑ Pages 63–65: Laffont, Jean-Jacques (1988). "3 Nonconvexities". Fundamentals of public economics. MIT. ISBN 0-262-12127-1. ISBN 978-0-262-12127-9. External link in
|publisher=(help) - ↑ Varian, Hal R. (1992). "21.2 Convexity and size". Microeconomic Analysis (3rd ed.). W. W. Norton & Company. pp. 393–394. ISBN 978-0-393-95735-8. MR 1036734.
Page 628: Mas–Colell, Andreu; Whinston, Michael D.; Green, Jerry R. (1995). "17.1 Large economies and nonconvexities". Microeconomic theory. Oxford University Press. pp. 627–630. ISBN 978-0-19-507340-9.
- ↑ Page 169 in the first edition: Starr, Ross M. (2011). "8 Convex sets, separation theorems, and non‑convex sets in RN". General equilibrium theory: An introduction (Second ed.). Cambridge: Cambridge University Press. ISBN 978-0-521-53386-7. MR 1462618.
In Ellickson, page xviii, and especially Chapter 7 "Walras meets Nash" (especially section 7.4 "Nonconvexity" pages 306–310 and 312, and also 328–329) and Chapter 8 "What is Competition?" (pages 347 and 352): Ellickson, Bryan (1994). Competitive equilibrium: Theory and applications. Cambridge University Press. p. 420. doi:10.2277/0521319889. ISBN 978-0-521-31988-1.
- ↑ Theorem 1.6.5 on pages 24–25: Ichiishi, Tatsuro (1983). Game theory for economic analysis. Economic theory, econometrics, and mathematical economics. New York: Academic Press, Inc. [Harcourt Brace Jovanovich, Publishers]. pp. x+164. ISBN 0-12-370180-5. MR 700688.
- ↑ Pages 127 and 33–34: Cassels, J. W. S. (1981). "Appendix A Convex sets". Economics for mathematicians. London Mathematical Society lecture note series. 62. Cambridge, New York: Cambridge University Press. pp. xi+145. ISBN 0-521-28614-X. MR 657578.
- ↑ Pages 93–94 (especially example 1.92), 143, 318–319, 375–377, and 416: Carter, Michael (2001). Foundations of mathematical economics. MIT Press. pp. xx+649. ISBN 0-262-53192-5. MR 1865841.
Page 309: Moore, James C. (1999). Mathematical methods for economic theory: Volume I. Studies in economic theory. 9. Berlin: Springer-Verlag. pp. xii+414. ISBN 3-540-66235-9. MR 1727000.
Pages 47–48: Florenzano, Monique; Le Van, Cuong (2001). Finite dimensional convexity and optimization. Studies in economic theory. 13. in cooperation with Pascal Gourdel. Berlin: Springer-Verlag. pp. xii+154. ISBN 3-540-41516-5. MR 1878374.
- ↑ Economists have studied non‑convex sets using advanced mathematics, particularly differential geometry and topology, Baire category, measure and integration theory, and ergodic theory: Trockel, Walter (1984). Market demand: An analysis of large economies with nonconvex preferences. Lecture Notes in Economics and Mathematical Systems. 223. Berlin: Springer-Verlag. pp. viii+205. ISBN 3-540-12881-6. MR 737006.
- 1 2 Page 1: Guesnerie, Roger (1975). "Pareto optimality in non‑convex economies". Econometrica. 43: 1–29. doi:10.2307/1913410. JSTOR 1913410. MR 443877. ("Errata". Econometrica. 43 (5–6): 1010. 1975. doi:10.2307/1911353. JSTOR 1911353. MR 443878.)
- ↑ Sraffa, Piero (1926). "The Laws of returns under competitive conditions". Economic Journal. 36 (144): 535–550. doi:10.2307/2959866. JSTOR 2959866.
- ↑ Hotelling, Harold (July 1938). "The General welfare in relation to problems of taxation and of railway and utility rates". Econometrica. 6 (3): 242–269. doi:10.2307/1907054. JSTOR 1907054.
- ↑ Pages 5–7: Quinzii, Martine (1992). Increasing returns and efficiency (Revised translation of (1988) Rendements croissants et efficacité economique. Paris: Editions du Centre National de la Recherche Scientifique ed.). New York: Oxford University Press. pp. viii+165. ISBN 0-19-506553-0.
- ↑ Pages 106, 110–137, 172, and 248: Baumol, William J.; Oates, Wallace E.; with contributions by V. S. Bawa and David F. Bradford (1988). "8 Detrimental externalities and nonconvexities in the production set". The Theory of environmental policy (Second ed.). Cambridge: Cambridge University Press. pp. x+299. doi:10.2277/0521311128. ISBN 978-0-521-31112-0.
- ↑ Starrett, David A. (1972). "Fundamental nonconvexities in the theory of externalities". Journal of Economic Theory. 4 (2): 180–199. doi:10.1016/0022-0531(72)90148-2. MR 449575.
Starrett discusses non‑convexities in his textbook on public economics (pages 33, 43, 48, 56, 70–72, 82, 147, and 234–236): Starrett, David A. (1988). Foundations of public economics. Cambridge economic handbooks. Cambridge: Cambridge University Press.
- ↑ Radner, Roy (1968). "Competitive equilibrium under uncertainty". Econometrica. 36: 31–53. doi:10.2307/1909602.
- ↑ Page 270: Drèze, Jacques H. (1987). "14 Investment under private ownership: Optimality, equilibrium and stability". In Drèze, J. H. Essays on economic decisions under uncertainty. Cambridge: Cambridge University Press. pp. 261–297. ISBN 0-521-26484-7. MR 926685. (Originally published as Drèze, Jacques H. (1974). "Investment under private ownership: Optimality, equilibrium and stability". In Drèze, J. H. Allocation under Uncertainty: Equilibrium and Optimality. New York: Wiley. pp. 129–165.)
- ↑ Page 371: Magill, Michael; Quinzii, Martine (1996). "6 Production in a finance economy, Section 31 Partnerships". The Theory of incomplete markets. Cambridge, Massachusetts: MIT Press. pp. 329–425.
- ↑ Mas-Colell, A. (1987). "Non‑convexity". In Eatwell, John; Milgate, Murray; Newman, Peter. The New Palgrave: A Dictionary of Economics (PDF) (first ed.). Palgrave Macmillan. pp. 653–661. doi:10.1057/9780230226203.3173.
- ↑ Rockafellar, R. Tyrrell; Wets, Roger J-B (1998). Variational analysis. Grundlehren der Mathematischen Wissenschaften [Fundamental Principles of Mathematical Sciences]. 317. Berlin: Springer-Verlag. pp. xiv+733. ISBN 3-540-62772-3. MR 1491362.
- ↑ Chapter 8 "Applications to economics", especially Section 8.5.3 "Enter nonconvexity" (and the remainder of the chapter), particularly page 495:
Mordukhovich, Boris S. (2006). Variational analysis and generalized differentiation II: Applications. Grundlehren Series (Fundamental Principles of Mathematical Sciences). 331. Springer. pp. i–xxii and 1–610. MR 2191745.
- ↑ Brown, Donald J. (1991). "36 Equilibrium analysis with non‑convex technologies". In Hildenbrand, Werner; Sonnenschein, Hugo. Handbook of mathematical economics, Volume IV. Handbooks in Economics. 1. Amsterdam: North-Holland Publishing Co. pp. 1963–1995 [1966]. doi:10.1016/S1573-4382(05)80011-6. ISBN 0-444-87461-5. MR 1207195.
- ↑ Chichilnisky, G. (1993). "Intersecting families of sets and the topology of cones in economics" (PDF). Bulletin of the American Mathematical Society (New Series). 29 (2): 189–207. doi:10.1090/S0273-0979-1993-00439-7. MR 1218037.
References
- Blume, Lawrence E. (2008c). "Convexity". In Durlauf, Steven N.; Blume, Lawrence E. The New Palgrave Dictionary of Economics (Second ed.). Palgrave Macmillan. doi:10.1057/9780230226203.0315.
- Blume, Lawrence E. (2008cp). "Convex programming". In Durlauf, Steven N.; Blume, Lawrence E. The New Palgrave Dictionary of Economics (Second ed.). Palgrave Macmillan. doi:10.1057/9780230226203.0314. Check date values in:
|date=(help) - Blume, Lawrence E. (2008d). "Duality". In Durlauf, Steven N.; Blume, Lawrence E. The New Palgrave Dictionary of Economics (Second ed.). Palgrave Macmillan. doi:10.1057/9780230226203.0411.
- Crouzeix, J.-P. (2008). "Quasi-concavity". In Durlauf, Steven N.; Blume, Lawrence E. The New Palgrave Dictionary of Economics (Second ed.). Palgrave Macmillan. doi:10.1057/9780230226203.1375.
- Diewert, W. E. (1982). "12 Duality approaches to microeconomic theory". In Arrow, Kenneth Joseph; Intriligator, Michael D. Handbook of mathematical economics, Volume II. Handbooks in economics. 1. Amsterdam: North-Holland Publishing Co. pp. 535–599. doi:10.1016/S1573-4382(82)02007-4. ISBN 978-0-444-86127-6. MR 648778.
- Green, Jerry; Heller, Walter P. (1981). "1 Mathematical analysis and convexity with applications to economics". In Arrow, Kenneth Joseph; Intriligator, Michael D. Handbook of mathematical economics, Volume I. Handbooks in economics. 1. Amsterdam: North-Holland Publishing Co. pp. 15–52. doi:10.1016/S1573-4382(81)01005-9. ISBN 0-444-86126-2. MR 634800.
- Luenberger, David G. Microeconomic Theory, McGraw-Hill, Inc., New York, 1995.
- Mas-Colell, A. (1987). "Non‑convexity". In Eatwell, John; Milgate, Murray; Newman, Peter. The New Palgrave: A Dictionary of Economics (PDF) (first ed.). Palgrave Macmillan. pp. 653–661. doi:10.1057/9780230226203.3173.
- Newman, Peter (1987c). "Convexity". In Eatwell, John; Milgate, Murray; Newman, Peter. The New Palgrave: A Dictionary of Economics (first ed.). Palgrave Macmillan. doi:10.1057/9780230226203.2282.
- Newman, Peter (1987d). "Duality". In Eatwell, John; Milgate, Murray; Newman, Peter. The New Palgrave: A Dictionary of Economics (first ed.). Palgrave Macmillan. doi:10.1057/9780230226203.2412.
- Rockafellar, R. Tyrrell (1997). Convex analysis. Princeton landmarks in mathematics (Reprint of the 1979 Princeton mathematical series 28 ed.). Princeton, NJ: Princeton University Press. ISBN 0-691-01586-4. MR 1451876,. MR 274683.
- Schneider, Rolf (1993). Convex bodies: The Brunn–Minkowski theory. Encyclopedia of mathematics and its applications. 44. Cambridge: Cambridge University Press. pp. xiv+490. ISBN 0-521-35220-7. MR 1216521.